3DSys
Systemübergreifende Sicherheit autonomer und teilautonomer Systeme
Eine interdisziplinäre Kooperation der technischen Universität Chemnitz und der Hochschule Mittweida
Projektbeschreibung
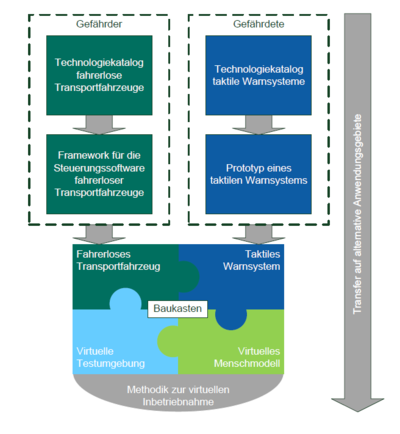
Mobile autonome und teilautonome Systeme sind Gegenstand vielfältiger Diskussion, in der Produktion bereits gelebte Realität. Diese Systeme werden künftig eine zentrale Rolle spielen, was z.B. die steigende Anzahl an fahrerlosen Transportfahrzeugen (FTF) in der Industrie beweist. Hierdurch treten ganz neue Herausforderungen auf, die sowohl die Maschine-Maschine Kommunikation aus auch die Maschine-Mensch-Interaktion betreffen. Das dabei insbesondere die sicherheitsrelevanten Faktoren von übergeordneter Bedeutung sind, zeigt die Unfallstatistik in der Intralogistik mit Staplerverkehr. In diesem Projekt wollen die Technische Universität Chemnitz und die Hochschule Mittweida gemeinsam ihre Kompetenzen in den Einzeldisziplinen fahrerlose Transportfahrzeuge und taktile Warnsysteme verbinden und in einer Forschungskooperation methodisch die bestehenden Systemgrenzen mehrseitig überdecken. Technologien für Gefährder, u.a. die Steuerungssoftware moderner autonomer bzw teilautonomer Fahrzeuge, und Technologien für Gefährdete, z.B. taktile Warnsysteme, aus einer systemübergreifenden Sichtweise heraus zu entwickeln und in Betrieb zu nehmen ist Kern der Aufgabe.
Ein wichtiger Bestandteil, um die Komplexität dieser und ähnlicher Systeme handhabbar zu gestalten und dennoch möglichst schnell Ideen in konkrete Produkte überführen zu können, ist dabei die Entwicklung von Methoden der virtuellen Inbetriebnahme. Über mehrere Entwicklungsstufen und Systemderivate können hierdurch Systemzustände und Interaktionen detaillliert untersucht werden, ohne dass alle Komponenten bereits real und vollständig vorhanden sind.
Das Problem
- Fahrerlose Transportsysteme (FTS) dürfen Personen oder Elemente der Infrastruktur nicht gefährden. Entsprechend müssen sie mit einer Umfelderkennung ausgestattet sein, die ein sicher potentielle Gefahren erkennt, aber auch schnell genug arbeitet, um einen effizienten Einsatz des FTS gewährleistet
- Die Inbetriebnahme bzw. das Anlernen dieser Systeme ist aufgrund der komplexen Szenarien, in denen sich ein FTS befinden kann, sehr aufwendig.
- Personen sind in Produktionsumgebungen häufig besonders gefährdet. Gerade konzentriertes Arbeiten an einer speziellen Aufgabe führt dabei häufig zum Ausblenden von Umgebungsinformationen, also auch von Warnsignalen von Produktionssystemen, Flurfördersystemen, Fahrzeugen u.ä..
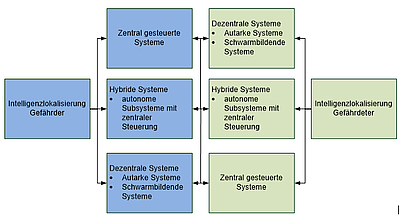
In Hinblick auf mögliche Lösungsansätze können die relevanten Systeme dabei in unterschiedlichen Kofigurationen der "Intelligenzverteilung" miteinander agieren. Die jeweiligen Vor- und Nachteile für das jeweilige Einsatzszenario müssen vor einer Implementierung bekannt sein, um zuverlässig funktionierende Lösungen sicherzustellen.
Die drei zentrale Forschungsfragen
Aus der Aufgabenstellung ergeben sich für die wiss.-techn. Arbeit drei wesentliche Aufgabenstellungen
- Wie müssen autonome und teilautonome Transportfahrzeuge softwareseitig gestaltet sein und welche Randparameter müssen beachtet werden, um sie unter Nutzung virtueller Techniken in Betrieb nehmen zu können?
- Welche technischen Möglichkeiten gibt es, unter Nutzung von taktilen, optischen und akustischen Feedbacks, eine natürlich Mensch-Technik-Interaktion zu gestalten?
- Wie muss eine virtuelle Testumgebung methodisch richtig gestaltet sein, damit alle relevanten Rand- und Einflussparameter eingehen und wie können fahrerlose Transportsysteme und taktile Warnsysteme gemeinsam in der Testumgebung in Betrieb genommen werden?
Unser Kooperationspartner
Die TU Chemnitz arbeitet daran, ein flexibles und anpassbares Framework für die Steuerungssoftware fahrerloser Transportfahrzeuge (FTF) zu entwickeln. Das Framework wird mit der Prämisse entwickelt, virtuell inbetriebnehmbar zu sein. Dadurch bietet es die Möglichkeit, mit weinig Mehraufwand flexibel mit den Komponenten Mensch und Warnsystem gemeinsam betrachtet werden zu können. Verglichen mit einer traditionellen Inbetriebnahme können damit mehr Tests in kürzerer Zeit durchgeführt werden und folglich die Gesamtaussage verbessert werden.
Weitere Informationen zum Projekt finden Sie unter: https://followme-ils.com
Das Projekt wird im Rahmen der "Forschungsinfrastruktur und Forschungsprojekte im Bereich anwendungsnaher öffentlicher Forschung" durch durch Mittel der Europäischen Union und des Freistaates Sachsen gefördert.
