Robotik
Die Robotik führt u. a. die Fachgebiete Regelungs- und Steuerungstechnik, Informatik, Mechanik, Maschinenbau, Mathematik, Elektronik, Sensorik, Antriebstechnik, Mikromechanik zusammen. Die Gesamtheit dieser Disziplinen wird als Mechatronik bezeichnet. Somit ist die Robotik eine der wichtigsten Anwendungen der Mechatronik.
In der Lehrveranstaltung Robotik werden hier die wichtigsten Punkte stationärer Roboter behandelt. Im Folgenden sind wesentlich Lehrinhalte aufgeführt:
- Historie, Begriffe, Einsatzgebiete von Industrierobotern, Komponenten eines Industrieroboters, typische Kinematiken für Industrieroboter
- Angabe von Position und Orientierung, Rotationsmatrizen, Euler-Winkel, Vier-Quadranten Arkustangens, homogene Transformationsmatrizen, Verschiebe- und Rotationsoperatoren, Quaternionen
- Vorwärtstransformation: Lösung für serielle Roboter nach Denavit-Hartenberg
- Rückwärtstransformation: numerische und analytische Lösungsverfahren
- Kinematik der Geschwindigkeiten (analytische und geometrische Jacobi-Matrix, inverse Jacobi-Matrix), Transformation von Kräften und Momenten
- Programmierarten, Arten von Koordinatensystemen, Bewegungsarten, Interpolation und Regelung, Überschleifen von Bewegungen, Programmiersprachen
- Sensoren für Roboter (Sensoren zur Weg- und Winkelmessung, Sensoren zur Positionserfassung, Kraft-/ Momentsensoren, Sensoren zum Erkennen von Objekten, Sicherheitssensoren)
In der Lehrveranstaltung Robotersysteme werden ausgewählte Inhalte vertieft behandelt. Dazu zählen:
- Wiederholung und Vertiefung mathematischer Grundlagen, wie Euler-Winkel, Rotationsmatrizen, homogene Transformationsmatrizen, Quaternionen, Operatorprinzip für Verschiebung und Rotation, etc.
- Vor- und Rückwärtstransformation für serielle und parallele Roboter
- Kinematik der Geschwindigkeiten, Transformation von Kräften und Momenten, singuläre Lagen
- Roboterprogrammierung
- Dynamik der Roboter
- Konzepte der Lageregelung
- Kraft-/ Momentregelung
- Redundante Roboter
Für praktische Übungen verfügt die Professur Fertigungsautomatisierung über mehrere stationäre Roboter mit Sensorik.

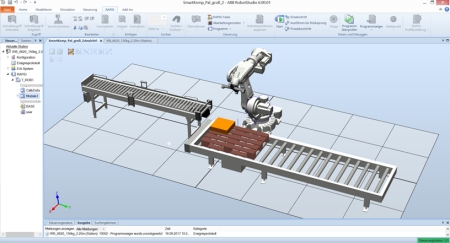
Zur Simulation von Roboterarbeitszellen steht die Software RobotStudio zur Verfügung.