Kollisionsvermeidung
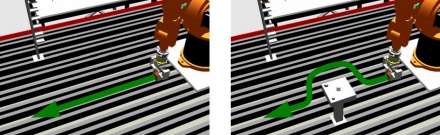
Im industriellen Einsatz bewegen sich Roboter bisher meist auf fest programmierten Bahnen. Sein Arbeitsbereich ist üblicherweise durch einen Schutzzaun abgetrennt oder er wird durch sog. Lichtvorhänge überwacht, um im Falle des Zutritts einer Person die Roboterbewegung zu stoppen. Veränderungen im Arbeitsraum, z. B. durch das Hinzukommen von Objekten, führen im schlimmsten Fall zu Kollisionen zwischen Roboter und Umgebung.
Zukünftig wird der Trend jedoch hin zu offenen Roboterzellen ohne trennende Schutzeinrichtungen gehen, in denen Roboter und Menschen gemeinsam arbeiten. Dadurch wird sich die Arbeitsumgebung des Roboters ständig verändern. In solch dynamischen Umgebungen sind intelligente Algorithmen zur Kollisionsvermeidung unerlässlich, um die Roboterbewegung bei Kollisionsgefahr zu stoppen oder besser noch die Bahn des Roboters soweit wie notwendig zu modifizieren.
Forschungsprojekt: VirEnA / Teilprojekt: Dynamische Kollisionsvermeidung in Roboterarbeitszellen (07/2015 bis 06/2017)
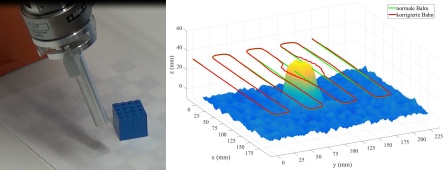
Im Rahmen des Forschungsprojektes VirEnA soll die Kollisionsvermeidung von Robotern in einer dynamischen Arbeitsumgebung weiter entwickelt und deren Auswirkungen auf den Produktionsprozess untersucht werden. Dabei wird davon ausgegangen, dass sich die Arbeitsumgebung des Roboters durch eingefügte Hindernisse verändert. Diese sollen durch externe Sensoren detektiert und lokalisiert werden. Danach werden auf den Hindernissen sog. künstliche Punktladungen platziert. Diese erzeugen eine virtuelle Kraft, die den Manipulator vom Hindernis weg bewegt.