Taktiles Greifen
Neben der Materialbearbeitung sind Handhabungsprozesse ein wichtiges Einsatzgebiet von Robotern. Dabei werden üblicherweise pneumatisch betriebene Greifer verwendet, wobei die Greifkraft durch den Luftdruck vorgegeben ist. Im Falle des Einsatzes von elektrisch betriebenen Greifern, kann die Greifkraft mit Hilfe des Motorenstromes eingestellt werden. Für noch feinfühligeres Greifen kommen taktile Sensoren in Frage. Diese können z. B. die Kraftverteilung an den Fingern des Greifers messen. Neben der Regelung des Greifvorganges ermöglicht die taktile Sensorik auch das Identifizieren von Bauteilen anhand ihrer Oberflächeneigenschaften.
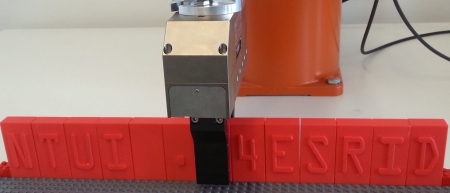
Der im nachfolgenden Beispiel verwendete Roboter ist mit einem servoelektrischen Zwei-Finger-Parallelgreifer ausgestattet. Die Finger enthalten jeweils eine taktile Sensormatrix, die die Verteilung der Greifkraft in einem Raster von 14x6 Messpunkten erfasst. Mit Hilfe der taktilen Information sollen Bauteile identifiziert und anschließend sortiert werden.