Kraft-/ Momentregelung
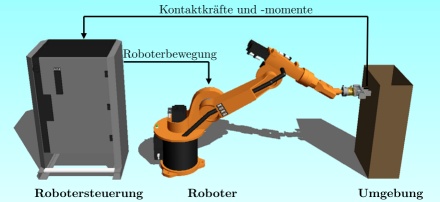
Die meisten der heute eingesetzten Industrieroboter arbeiten positionsgeregelt, das heißt eine vorher programmierte Bahn wird mit dem Werkzeug abgefahren. Muss der Roboter mit seiner Umgebung jedoch in physischen Kontakt treten, dann können schon kleine Abweichungen zu sehr hohen Kontaktkräften führen. In diesem Fall bietet es sich an die sog. Kraft-/ Momentregelung einzusetzen. Dabei werden die Kontaktkräfte zwischen Roboter und Umgebung mit Hilfe eines Kraft-/ Momentsensors bzw. durch Gelenkmomentsensoren gemessen und zur Beeinflussung von Roboterposition bzw. -bewegung benutzt.

Einsatzgebiete der Kraft-/ Momentregelung sind Montageaufgaben wie Anordnen, Fügen, Verschrauben und Kleben von Bauteilen, Aufgaben der Materialbearbeitung wie Schleifen, Polieren, Entgraten, Bohren und Umformen und die Umgebungsinteraktion in Form der Kooperation zwischen Mensch und Roboter oder auch die Zusammenarbeit von mehreren Robotern.
Der Einsatz entsprechender Algorithmen erfordert Überlegungen hinsichtlich der Auswahl einer geeigneten Reglerstruktur und der Parametrierung des Reglers. Bei der Verwendung industrieller Robotersteuerungen spielen außerdem Einschränkungen, wie die Verhinderung des Zugriffs auf die Motorenströme, eine wichtige Rolle.