Mensch-Roboter Interaktion
Bisher sind die Arbeitsbereiche von Robotern und Menschen meist strikt durch Schutzzäune oder Lichtvorhänge getrennt. Jedoch geht der Trend hin zu offenen Roboterzellen, in denen Menschen und Roboter koexistieren oder sogar kooperieren.
Forschungsprojekt: Fertigungskonzeption 4.0 – Adaptive Automation für die Fertigung mit Mensch und Anlage (02/2016 bis 12/2018)
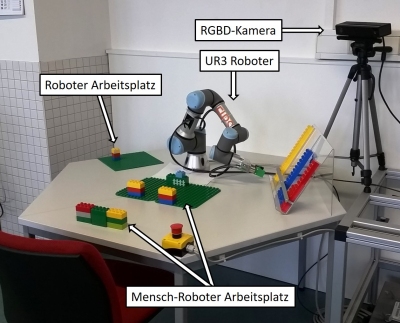
Im Rahmen dieses Forschungsprojektes sollen Möglichkeiten erarbeitet und untersucht werden, den Automatisierungsgrad von Produktionsprozessen zu adaptieren. Dieser kann zwischen 0% (ausschließlich manuelle Tätigkeit) und 100% (voll automatisiert) liegen. Für einen Montageprozess kann z. B. ein Roboter als Automatisierungsmittel gewählt werden. Die Verfügbarkeit von Robotersystemen für den personensicheren Betrieb, erlaubt es auch Menschen in den Produktionsprozess zu integrieren und so den Automatisierungsgrad anzupassen. Vorteile ergeben sich hier z. B. hinsichtlich der Flexibilität bei Bauteiländerungen und schwankender Mitarbeiterverfügbarkeit.
Im gewählten Beispielszenario sollen individualisierte Produkte montiert werden. Der Automatisierungsgrad wird situations- und produktabhängig adaptiert. Die Situationserkennung übernimmt hierbei eine RGBD-Kamera.
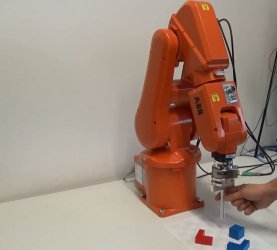
Kraftbasierte Interaktion
Eine weitere Variante der Interaktion des Menschen mit dem Roboter basiert auf dem Einwirken mit Kräften und Momenten. Der Roboter kann so durch Anfassen gesteuert werden. Man spricht hier auch von Handführen. Diese ist mittlerweile zum Stand der Technik geworden und wird z. B. zur komfortablen Roboterprogrammierung benutzt.
Im hier vorgestellten Szenario wird das Handführen mit dem Ansatz der Kollisionsvermeidung durch virtuelle Kräfte kombiniert. Diese wirken auf den Roboter bewegen ihn von gesperrten Zonen im Arbeitsraum weg. Indem der Bediener die Bereiche spürt, die für den Manipulator verboten sind, wird er intuitive bei der Steuerung des Roboters unterstützt. Neben der Anwendung bei der Roboterprogrammierung, ergeben sich auch vielfältige Einsatzszenarien auf dem Gebiet der Zusammenarbeit von Mensch und Roboter.